The first demonstration of using differentiable simulation for controlling a real quadruped robot. An exciting paper coming soon.
The fundamental advantage of reinforcement learning over optimal control lies in its optimization objective.
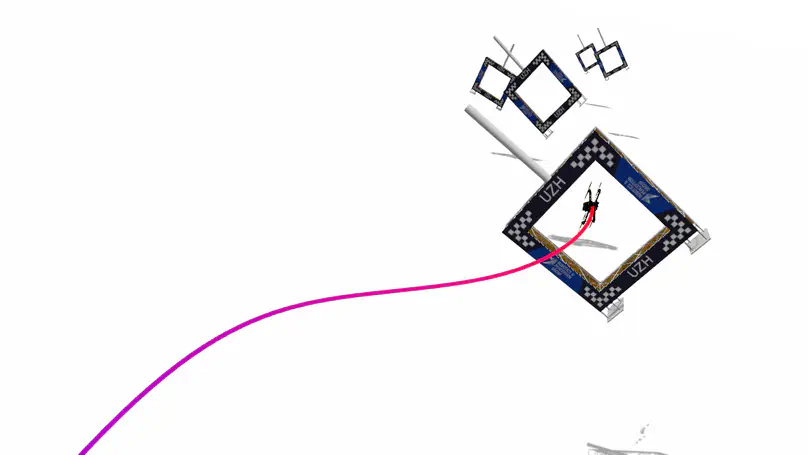
We propose using policy search for automatically choosing high-level decision variables for MPC, which leads to a novel policy-search-for-model-predictive-control framework.
Flightmare is a flexible quadrotor simulator for reinforcement learning.